Von maschinenintegrierter Robotik zur systemintegrierten, digitalen Komponente
Im ersten Teil wurde gezeigt, wie sich moderne Robotik aus offenen, steuerungs und antriebsunabhängigen Komponenten zusammensetzt und damit zur Grundlage dezentraler Maschinen und Fabrikarchitekturen wird. Robotik wird nicht länger als abgeschlossene Einheit verstanden, sondern als integrierbarer Funktionsbaustein innerhalb modularer Automatisierungssysteme.
Gerade im Verpackungsmaschinenbau ist diese Denkweise seit Jahren gelebte Praxis. Parallele Kinematiken wie Delta Roboter wurden früh nicht als autonome Roboterzellen eingesetzt, sondern konsequent als maschinenintegrierte Funktionseinheiten ausgelegt. Mechanik, Antriebstechnik, Steuerung, Sensorik und Prozesslogik entstanden von Beginn an als abgestimmtes Gesamtsystem. Aufbauend auf diesem Komponentenverständnis richtet sich der Blick nun auf die nächste Konsequenz: die durchgängige digitale Integration dieser Robotik Komponenten über den gesamten Lebenszyklus hinweg.
Von der physischen Integration zur digitalen Durchgängigkeit
In maschinenintegrierten Robotik Anwendungen ist der Roboter kein zentrales Element einer separaten Zelle, sondern vollständig in Takt, Prozessabläufe und Sicherheitskonzepte der Maschine eingebunden. Mechanik, Motoren und Steuerung werden nicht unabhängig voneinander entwickelt, sondern gemeinsam ausgelegt, um Dynamik, Verfügbarkeit und Reproduzierbarkeit sicherzustellen.
Mit zunehmender Modularisierung und Dezentralisierung industrieller Anlagen verlagert sich das Systemdenken daher von der rein physischen Ebene in die digitale Welt. Robotik wird zum skalierbaren, parametrierbaren Funktionsbaustein innerhalb vernetzter Produktionssysteme. Ihr Verhalten wird nicht erst in der realen Anlage sichtbar, sondern bereits virtuell beschrieben, analysiert und optimiert. Der digitale Zwilling wird damit zur verbindenden Ebene zwischen Komponente, Maschine und Gesamtanlage.
Mechanik als Ankerpunkt des digitalen Zwillings
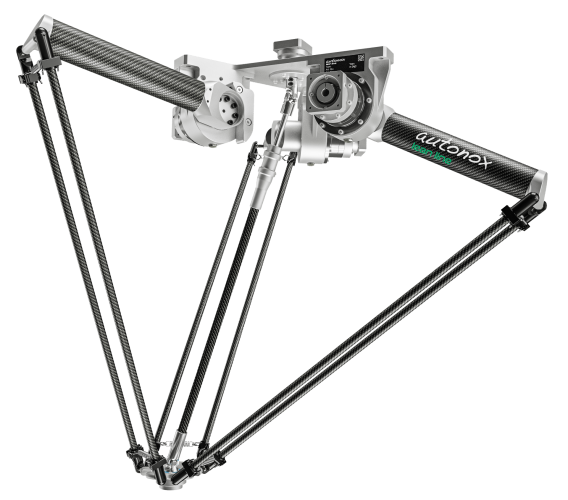
Die mechanische Kinematik bildet weiterhin den Ausgangspunkt jeder Robotik Komponente, und damit auch die Basis eines belastbaren digitalen Zwillings. Der DELTA RL4 1200 3kg (AL_00006) ist konsequent für dynamische Handling und Pick & Place Applikationen ausgelegt. Sein Arbeitsraum von 1.200 mm Durchmesser ermöglicht flexible Zellenkonzepte, während die auf geringe bewegte Massen optimierte Konstruktion hohe Beschleunigungen und kurze Zykluszeiten unterstützt. Gleichzeitig erlaubt das mechanische Design eine wirtschaftliche Umsetzung einfacher Handlings Aufgaben.
Diese Eigenschaften machen den Delta Roboter zu einem geeigneten Baustein für hochdynamische, einheitliche Produktionsarchitekturen – sowohl in der realen Anlage als auch im digitalen Modell. Die Mechanik im digitalen Modell ist dabei nicht nur Träger der Bewegung, sondern Referenz für alle weiteren digitalen Beschreibungen von Dynamik, Belastung und Prozessverhalten.
Antriebstechnik als digital beschreibbare Komponente
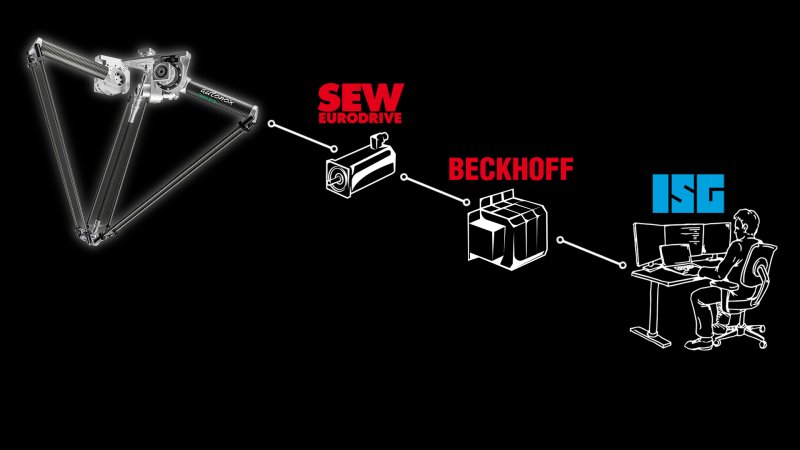
Die Leistungsfähigkeit der Mechanik entfaltet sich erst durch eine passgenau ausgelegte Antriebstechnik, die sich konsistent digital abbilden lässt. In der gezeigten Lösung kommen SEW CMP Servomotoren mit entsprechender SEW Antriebstechnik zum Einsatz. Deren hohe Leistungsdichte und dynamisches Verhalten sind insbesondere für Delta Kinematiken essenziell.
Entscheidend ist jedoch weniger die einzelne Hardwarekomponente als deren abgestimmte Auslegung und Parametrierung. Motor, Getriebe und Umrichter bilden einen reproduzierbaren Antriebsstrang, dessen Verhalten sowohl in der realen Maschine als auch im digitalen Zwilling identisch beschrieben wird. Das modulare Antriebskonzept unterstützt Skalierbarkeit, Wartbarkeit und die nahtlose Einbindung in übergeordnete Automatisierungsarchitekturen – ganz im Sinne des bereits im ersten Teil beschriebenen Komponentenansatzes.
Steuerung als verbindende Systemebene
Als Bindeglied zwischen Mechanik, Antrieb und Prozess fungiert die Steuerung. Mit Beckhoff TwinCAT CNC auf Basis von ISG-kernel kommt eine offene, softwarebasierte Automatisierungsplattform zum Einsatz, die SPS Funktionalität, Motion Control und Robotik in einer gemeinsamen Umgebung vereint. Diese Offenheit entspricht dem Komponentenverständnis moderner Robotik und ermöglicht eine durchgängige digitale Beschreibung des Maschinenverhaltens.
Über standardisierte Schnittstellen wie EtherCAT wird die physische Integration direkt in die digitale Ebene verlängert. Robotik wird nicht isoliert programmiert, sondern als integraler Bestandteil der Maschinen und Anlagenlogik modelliert, simuliert und betrieben. Gerade in Produktionsmaschinen entsteht so eine durchgängige Verbindung zwischen Komponente, Maschine und Gesamtprozess.
Simulation als methodischer Kern des digitalen Engineerings
Der eigentliche Mehrwert dieser Architektur entsteht bereits im Engineering. Mit ISG-virtuos wird die komplette Roboterzelle virtuell abgebildet, inklusive der realen Kinematik des Delta Roboters und der spezifischen Parameter der eingesetzten Antriebstechnik. Bewegungsabläufe, Taktzeiten und Lastfälle lassen sich realitätsnah analysieren, bevor die reale Anlage aufgebaut wird.
Kollisionsprüfungen, Grenzbereichsanalysen und Prozessvalidierungen erfolgen damit frühzeitig und datenbasiert. Die Simulation entwickelt sich von einem Visualisierungswerkzeug zu einem zentralen Instrument technischer Entscheidungsfindung und schließt direkt an die virtuelle Inbetriebnahme an.
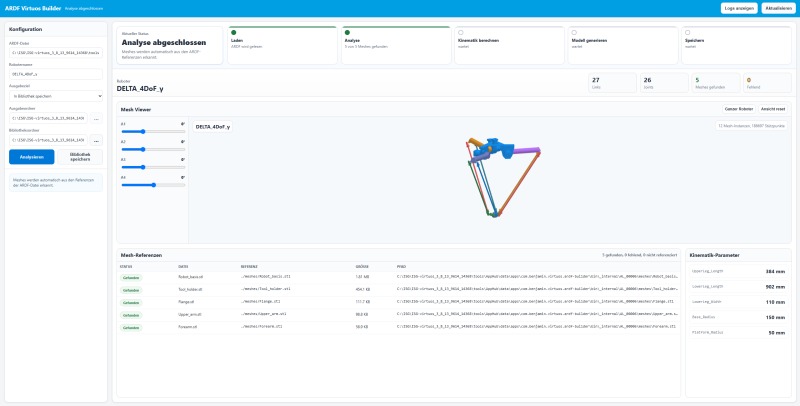
Geschlossener digitaler Zwilling durch Systemkopplung
Die konsequente Weiterführung dieses Ansatzes zeigt sich in der Kopplung von ISG-virtuos mit dem autonoxSimulator. Durch die Kopplung beider Systeme entsteht ein durchgängiger digitaler Zwilling, der das Zusammenspiel von Mechanik, Antrieb und Prozess quantitativ bewertet. Ausgangspunkt bildet der Import der von der Robotermechanik bereitgestellten Daten, welche sowohl die geometrische Struktur als auch die physikalischen Eigenschaften der Mechanik AL_00006 in ISG-virtuos beschreiben. Auf dieser Grundlage wird ein dynamisches Gesamtmodell erstellt.
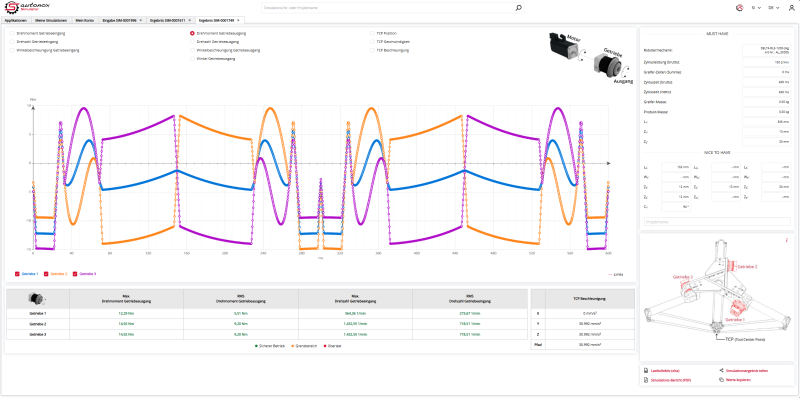
Über ein Plugin werden relevante Simulationsparameter, insbesondere Antriebsmomente, Greifer und Produktmassen, an den autonox Simulator übergeben. Der aktuell noch in der Betaphase für Pilotkunden verfügbare autonox Simulator stellt ein virtuelles, modellbasiertes Planungs- und Auslegungstool für autonox Mechaniken dar.
Er ermöglicht die präzise realitätsnahe Simulation des dynamischen Systemverhaltens auf Grundlage detaillierter physikalischer und kinematischer Modelle der autonox Mechaniken, inklusive. Hierbei werden insbesondere Getriebekinematik, Massenträgheiten, Bewegungsprofile sowie prozessspezifische Lastfälle. Auf diese Weise können bereits in einer frühen Projektphase fundierte Aussagen zur Leistungsfähigkeit, Auslegung und zum Grenzbetrieb des Robotersystems getroffen werden.
Im Rahmen der Simulation erfolgt unter anderem die Berechnung von Getriebeauslastungen unter Berücksichtigung von Lastkollektiven und dynamischen Kenngrößen wie Beschleunigungen, Taktraten und Zykluszeiten.
Die Simulationsergebnisse werden über die Schnittstelle zurück an ISG-virtuos übertragen. Dort stehen sie für weiterführende Analysen, Parametrierungen und iterative Optimierungsprozesse im Gesamtsystemkontext zur Verfügung.
Durch diesen geschlossenen digitalen Rückkopplungsprozess wird eine durchgängige, konsistente und effiziente Auslegung der Robotik Anwendung ermöglicht, wodurch sowohl Inbetriebnahme Zeiten reduziert als auch die Systemperformance und Betriebssicherheit nachhaltig verbessert werden.
Diese bidirektionale Kopplung schafft einen geschlossenen digitalen Engineering Kreislauf. Simulationsergebnisse lassen sich kontinuierlich verifizieren, mit realem Systemverhalten abgleichen und für die iterative Optimierung der Offline Programmierung nutzen.

Fazit: Vom Komponentenprinzip zur datengetriebenen Robotik
Wie bereits im ersten Teil unserer Serie: Bessere Robotik in Komponenten gezeigt, entsteht bessere Robotik nicht durch geschlossene Systeme, sondern durch offene, integrierbare Komponenten. Hier wird deutlich gemacht, dass dieses Prinzip im digitalen Raum seine volle Wirkung entfaltet. Produktionskonzepte lassen sich datenbasiert bewerten, variieren und optimieren, lange bevor reale Investitionen erfolgen. Das erhöht Planungssicherheit, reduziert Inbetriebnahmezeiten und senkt projektspezifische Risiken.
Maschinenintegrierte Robotik wird damit zur systemintegrierten, datengetriebenen Robotik. Planung, Engineering und Betrieb wachsen zu einem durchgängigen digitalen Gesamtprozess zusammen. Digitale Zwillinge, belastbare Simulationsdaten und vergleichbare Kennzahlen werden zu zentralen Werkzeugen, um Komplexität zu beherrschen und Investitionsentscheidungen fundiert abzusichern.
Damit schließt sich der Kreis: Was im Verpackungsmaschinenbau seit Jahren erfolgreich praktiziert wird, wird zur Blaupause für flexible und zukunftssichere Produktionssysteme und zur Grundlage für bessere Robotik in Komponenten.
autonox Robotics GmbH autonox Robotics ist ein in Willstätt (Baden Württemberg) ansässiges Unternehmen, das sich seit seiner Gründung im Jahr 2002 auf steuerungs- und antriebsunabhängige Robotermechaniken spezialisiert hat. Das Unternehmen entwickelt und fertigt seine Produkte im eigenen Haus und bietet über seinen digitalen Katalog eines der umfangreichsten Portfolios standardisierter Kinematiken für industrielle Anwendungen. Zu den Kernzielgruppen zählen Maschinenbauunternehmen und Roboterintegratoren, die flexible Robotermechaniken benötigen, die sich nahtlos in verschiedenste Automatisierungs- und Steuerungsplattformen integrieren lassen. Neben dem deutschen Hauptsitz betreibt autonox Robotics auch eine Niederlassung in Nordamerika, um internationale Märkte direkt zu unterstützen.
Beckhoff Automation Beckhoff Automation ist ein international tätiges Technologieunternehmen mit Sitz in Verl (Nordrhein-Westfahlen) und zählt zu den technologischen Treibern der PC basierten Automatisierungstechnik. Mit der Steuerungssoftware TwinCAT bietet Beckhoff eine offene und hochintegrierte Plattform, die SPS, Motion Control und Robotik in einer einheitlichen Engineering und Runtime Umgebung vereint. Die konsequente Nutzung offener Standards wie EtherCAT ermöglicht leistungsfähige, skalierbare und zukunftssichere Automatisierungslösungen. Besonders im Maschinenbau und bei maschinenintegrierten Robotiklösungen hat sich Beckhoff als verlässlicher Partner für flexible, softwaregetriebene Automatisierungsarchitekturen etabliert.
ISG Industrielle Steuerungstechnik GmbH Die ISG Industrielle Steuerungstechnik GmbH mit Sitz in Stuttgart ist ein seit 1987 etabliertes Technologieunternehmen im Bereich industrieller Steuerungs-, Automatisierungs- und Simulationstechnik. Mit über 35 Jahren Erfahrung unterstützt ISG weltweit Maschinen- und Anlagenbauer bei der Digitalisierung ihrer Entwicklungs und Inbetriebnahmeprozesse. Das Unternehmen verfügt über umfassende Expertise in CNC-, Robotik- und Motion-Control Software und entwickelt modulare Plattformen, die sich in unterschiedlichste Steuerungsumgebungen integrieren lassen. Durch enge Kooperationen mit Industrie- und Forschungspartnern treibt ISG die Weiterentwicklung digitales Engineering Methoden kontinuierlich voran.
SEW EURODRIVE SEW EURODRIVE mit Sitz in Bruchsal (Baden-Württemberg) ist einer der weltweit führenden Hersteller von Antriebstechnik und steht seit Jahrzehnten für zuverlässige, präzise und modular aufgebaute Antriebslösungen. Das Portfolio reicht von Servomotoren und Getrieben über Umrichtertechnik bis hin zu ganzheitlichen Automatisierungslösungen. Im Maschinen- und Anlagenbau, insbesondere in dynamischen Applikationen wie Handling und Verpackungstechnik, haben sich SEW Antriebssysteme als industrieller Standard etabliert. Durch die konsequente Modularität und die enge Abstimmung der Komponenten unterstützt SEW EURODRIVE flexible Maschinenkonzepte und dezentrale Produktionsarchitekturen.