From machine-integrated robotics to system-integrated digital components
In the first part, we showed how modern robotics is composed of open components independent of control systems and drives, forming the foundation of decentralized machines and factory architectures. Robotics is no longer understood as a closed unit, but as an integrable functional module within modular automation systems.
This approach has long been common practice, especially in packaging machinery. Parallel kinematics such as delta robots were not used as autonomous robotic cells, but consistently designed as machine-integrated functional units. Mechanics, drive technology, control systems, sensors, and process logic were developed from the outset as a coordinated overall system. Building on this component-based understanding, the focus now shifts to the next logical step: the seamless digital integration of these robotics components across the entire lifecycle.
From physical integration to digital continuity
In machine-integrated robotics applications, the robot is not a central element of a separate cell, but fully integrated into the machine’s cycle, processes, and safety concepts. Mechanics, motors, and control systems are not developed independently but are designed together to ensure dynamics, availability, and reproducibility.
With increasing modularization and decentralization of industrial systems, system thinking is shifting from the purely physical level to the digital world. Robotics becomes a scalable, parameterizable functional module within networked production systems. Its behavior is no longer only visible in the real system, but is already described, analyzed, and optimized virtually. The digital twin thus becomes the connecting layer between component, machine, and entire production system.
Mechanics as the anchor point of the digital twin
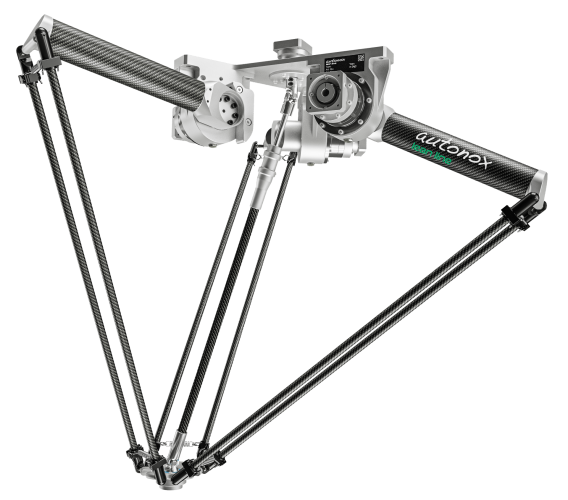
Mechanical kinematics remain the starting point for every robotics component and thus the basis of a reliable digital twin. The DELTA RL4-1200-3kg (AL_00006) is specifically designed for dynamic handling and pick-and-place applications. Its workspace with a diameter of 1200 mm enables flexible cell concepts, while its design optimized for low moving masses supports high acceleration and short cycle times. At the same time, the mechanical design allows cost-efficient implementation of simple handling tasks.
These characteristics make the delta robot a suitable building block for highly dynamic, standardized production architectures — both in real systems and in digital models. In the digital model, mechanics is not only the carrier of motion but also the reference for all further digital descriptions of dynamics, loads and process behavior.
Drive technology as a digitally describable component
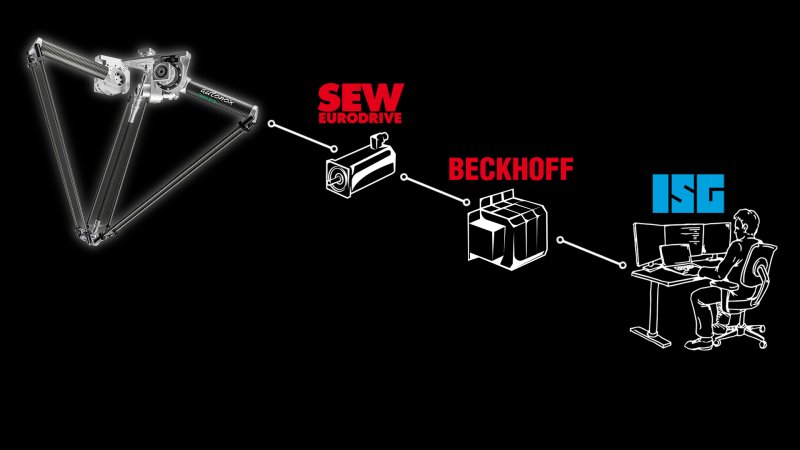
The full performance of the mechanics is only realized through precisely matched drive technology that can be consistently mapped digitally. In the solution presented, SEW CMP servo motors with corresponding SEW drive technology are used. Their high power density and dynamic behavior are essential, especially for delta kinematics.
The key factor is not the individual hardware component, but its coordinated design and parameterization. Motor, gearbox and inverter form a reproducible drive train whose behavior is described identically in both the real machine and the digital twin. The modular drive concept supports scalability, maintainability and seamless integration into higher-level automation architectures — in line with the component-based approach described in Part 1.
Control system as the connecting system layer
The control system acts as the link between mechanics, drive and process. With Beckhoff TwinCAT CNC based on the ISG kernel, an open, software-based automation platform is used that combines PLC functionality, motion control and robotics in a single environment. This openness reflects the component-based understanding of modern robotics and enables a consistent digital description of machine behavior.
Through standardized interfaces such as EtherCAT, physical integration is directly extended into the digital level. Robotics is not programmed in isolation but modeled, simulated and operated as an integral part of machine and system logic. Especially in production machines, this creates a seamless connection between component, machine and overall process.
Simulation as the methodological core of digital engineering
The real added value of this architecture emerges already during engineering. With ISG-virtuos, the entire robot cell is mapped virtually, including the real kinematics of the delta robot and the specific parameters of the drive technology used. Motion sequences, cycle times and load cases can be analyzed realistically before the physical system is built.
Collision checks, limit analyses and process validations are thus performed early and based on data. Simulation evolves from a visualization tool into a central instrument of technical decision-making and directly connects to virtual commissioning.
Closed digital twin through system coupling
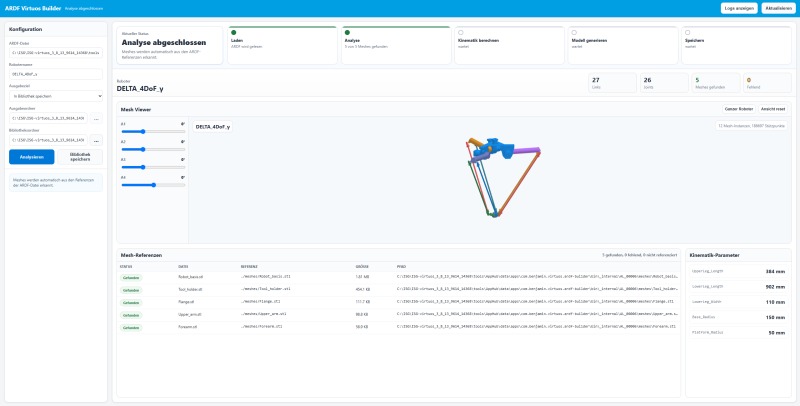
The logical continuation of this approach is demonstrated by coupling ISG-virtuos with the autonox Simulator. By linking both systems, a continuous digital twin is created that quantitatively evaluates the interaction of mechanics, drive and process. The starting point is the import of data provided by the robot mechanics, describing both the geometric structure and the physical properties of the AL_00006 mechanics in ISG-virtuos. Based on this, a dynamic overall model is created.
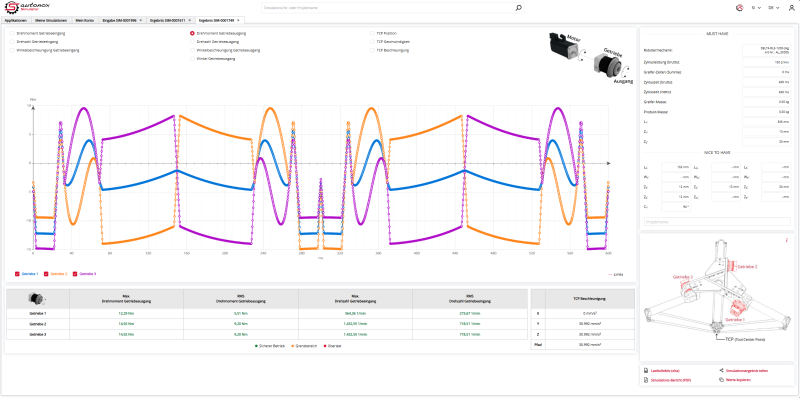
Via a plugin, relevant simulation parameters — particularly drive torques, gripper data and product masses — are transferred to the autonox Simulator. Currently available in beta for pilot customers, the autonox Simulator is a virtual, model-based planning and design tool for autonox mechanics.
It enables precise, realistic simulation of dynamic system behavior based on detailed physical and kinematic models, including gearbox kinematics, mass inertia, motion profiles and process-specific load cases. This allows well-founded statements about performance, system design, and operating limits to be made even in early project phases.
The simulation includes calculations of gearbox utilization, taking into account load collectives and dynamic parameters such as acceleration, cycle rates and cycle times.
The simulation results are transferred back to ISG-virtuos via an interface, where they are used for further analysis, parameterization, and iterative optimization within the overall system context.
This closed digital feedback loop enables consistent and efficient design of robotics applications, reducing commissioning times while sustainably improving system performance and operational reliability.
This bidirectional coupling creates a closed digital engineering loop. Simulation results can be continuously validated, compared with real system behavior and used to iteratively optimize offline programming.

Conclusion: From component-based principles to data-driven robotics
As already shown in Part 1 of our series “Better Robotics in Components”, better robotics does not arise from closed systems, but from open, integrable components. Part 2 makes it clear that this principle unfolds its full potential in the digital space. Production concepts can be evaluated, varied and optimized based on data long before real investments are made. This increases planning reliability, reduces commissioning times and lowers project-specific risks.
Machine-integrated robotics thus evolves into system-integrated, data-driven robotics. Planning, engineering and operation merge into a continuous digital overall process. Digital twins, reliable simulation data and comparable key figures become essential tools for managing complexity and making informed investment decisions.
This completes the circle: what has long been successfully practiced in packaging machinery becomes the blueprint for flexible and future-proof production systems and the foundation for better robotics in components.
autonox Robotics GmbH autonox Robotics is a company based in Willstaett, Germany (Baden Wuerttemberg), specializing in control and drive independent robot mechanics since its founding in 2002. The company develops and manufactures its products in-house and offers one of the industry’s most extensive catalogs of standardized kinematics for industrial applications. Key target groups include machine builders and robot integrators that require flexible robot mechanics that can be seamlessly integrated into various automation and control platforms. Neben dem deutschen Hauptsitz betreibt autonox Robotics auch eine Niederlassung in Nordamerika, um internationale Märkte direkt zu unterstützen.
Beckhoff Automation Beckhoff Automation, headquartered in Verl (North Rhine-Westphalia), is an internationally active technology company and a driving force in PC-based automation. With its TwinCAT control software, Beckhoff offers an open and highly integrated platform that combines PLC, motion control, and robotics in a single engineering and runtime environment. The consistent use of open standards such as EtherCAT enables powerful, scalable and future-proof automation solutions. Beckhoff has established itself as a reliable partner, particularly in mechanical engineering and machine-integrated robotics.
ISG Industrielle Steuerungstechnik GmbH ISG, based in Stuttgart, is a technology company established in 1987 specializing in industrial control, automation and simulation technology. With over 35 years of experience, ISG supports machine builders and system integrators worldwide in digitalizing their development and commissioning processes. The company has deep expertise in CNC, robotics and motion control software and develops modular platforms that integrate with diverse control environments. Through close cooperation with industry and research partners, ISG continuously advances digital engineering methods and actively shapes the future of automated production systems with its team of around 70 employees.
SEW EURODRIVE SEW-EURODRIVE, headquartered in Bruchsal (Baden-Württemberg), is one of the world’s leading manufacturers of drive technology and has stood for reliable, precise, and modular drive solutions for decades. Its portfolio ranges from servo motors and gear units to inverter technology and complete automation solutions. In mechanical and plant engineering — particularly in dynamic applications such as handling and packaging — SEW drive systems have become an industrial standard. Through consistent modularity and close coordination of components, SEW-EURODRIVE supports flexible machine concepts and decentralized production architectures. /p>